L’interface de communication série est soit intégrée dans l’UC ou le module de traitement (dans l’automate programmable industriel), soit il peut s’agir d’un module de communication séparé. Ces interfaces RS sont principalement utilisées pour transmettre des données raisonnablement à un débit de données élevé entre l’automate et l’équipement distant. Les lecteurs de codes-barres, les imprimantes et les systèmes de vision sont des exemples de ces interfaces.
Le protocole série RS-232 est conçu pour prendre en charge un émetteur et un récepteur et assure ainsi la communication entre un contrôleur et un ordinateur. La longueur maximale du câble doit être jusqu’à 50 pieds. Les normes de communication série RS 422 (1Tx, 10 Rx) et RS485 (32Tx, 32 Rx) sont conçues pour communiquer entre un ordinateur et plusieurs contrôleurs. Ces normes sont limitées à des longueurs de 1650 pieds (dans le cas de RS422) et de 650 pieds (dans le cas de RS485).
2. HART (transducteur distant adressable sur autoroute)
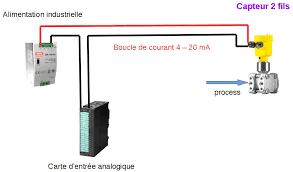
HART est un protocole de réseau de contrôle de processus ouvert, superposant des signaux de communication numériques sur des signaux 4-20 mA à l’aide de la technique Bell 202 Frequency Shift Keying (FSK).
C’est le seul réseau de communication qui facilite à la fois la communication analogique et la communication numérique bidirectionnelle par le même câblage, et ces réseaux sont donc également appelés réseaux hybrides. Ce signal numérique, appelé signal HART, transporte des informations de diagnostic, la configuration de l’appareil, l’étalonnage et d’autres mesures de processus supplémentaires.
Le réseau HART fonctionne en mode point à point ou multipoint. En mode point à point, des signaux de courant 4-20 mA sont utilisés pour contrôler le processus tandis que les signaux HART restent inchangés. Le réseau multipoint HART est utilisé lorsque les appareils sont très espacés. Les appareils de terrain intelligents multivariables compatibles HART sont largement utilisés dans de nombreuses industries. Le réseau de communication HART est principalement utilisé dans les applications SCADA.
3. DeviceNet
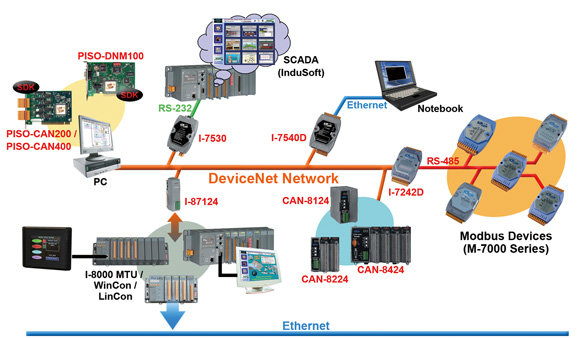
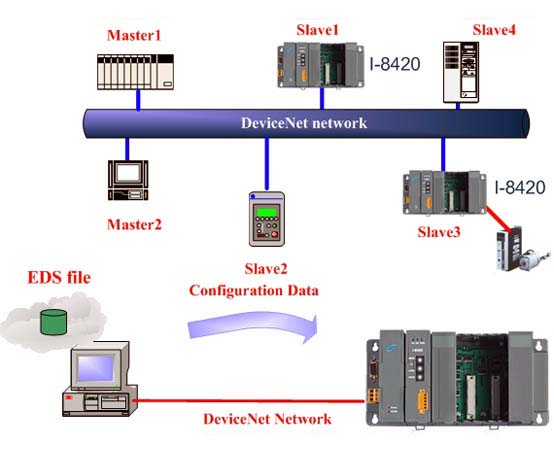
Il s’agit d’une hiérarchie d’appareils ouverte basée sur la technologie CAN. Il est conçu pour interfacer des appareils de terrain (tels que des capteurs, des commutateurs, des lecteurs de codes-barres, des écrans de panneau de commande, etc.) avec des contrôleurs de niveau supérieur (tels que des API) avec acceptation. protocole CAN de base unique. Il peut prendre en charge jusqu’à 64 nœuds et jusqu’à 2048 appareils au total
Il réduit les coûts du réseau en intégrant tous les appareils sur des câbles à quatre fils qui transportent à la fois les données et l’alimentation. La mise sous tension du réseau permet aux appareils d’être alimentés directement à partir du système et réduit ainsi les points de connexion physiques. Ce réseau est couramment utilisé dans les industries de l’automobile et des semi-conducteurs.
4. ControlNet
Il s’agit d’un réseau de contrôle ouvert qui utilise le protocole industriel commun (CIP) pour combiner la fonction des réseaux d’égal à égal et d’E/S en offrant des performances à haut débit. Ce réseau est une combinaison de Data Highway Plus (DH +) et d’E/S distantes. Il est utilisé pour la transmission de données en temps réel de données critiques et non critiques entre les E/S ou les microprocesseurs sur le même réseau.
Il peut communiquer avec jusqu’à 99 nœuds à un débit de 5 millions de bits par seconde. Il est conçu pour être utilisé à la fois sur les équipements et sur le terrain des systèmes d’automatisation industrielle. Il fournit des médias et une redondance des médias à tous les nœuds du réseau.
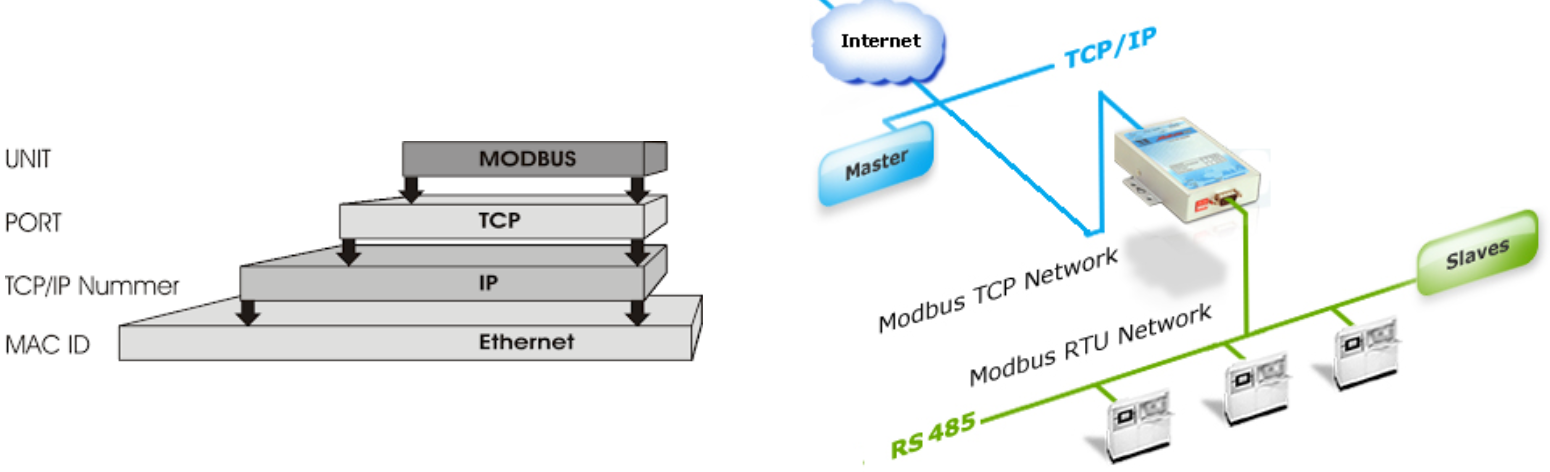
5. Modbus
Il s’agit d’un protocole système ouvert qui peut s’exécuter sur de nombreuses couches physiques différentes. C’est le protocole le plus largement utilisé dans les applications de contrôle industriel. C’est une technique de communication série qui fournit une relation maître/esclave pour communiquer entre les appareils connectés sur le réseau. Cela peut être fait sur n’importe quel support de transmission, mais est souvent utilisé avec RS232 et RS485.

Modbus série avec RS232 ou RS485 (en tant que couches physiques) facilite la connexion des appareils Modbus avec des contrôleurs (tels que des API) dans la structure du bus. Il peut communiquer entre un maître et plusieurs esclaves jusqu’à 247 avec un taux de transfert de données de 19,2 kbits/s.
Une version plus récente de Modbus TCP/IP utilise Ethernet comme couche physique pour faciliter l’échange de données entre les automates de différents réseaux. Quel que soit le type de réseau physique, il facilite la méthode d’accès et de contrôle d’un appareil par un autre appareil.
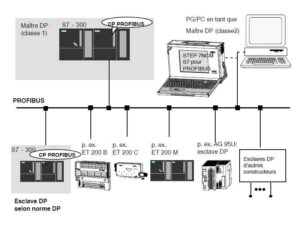
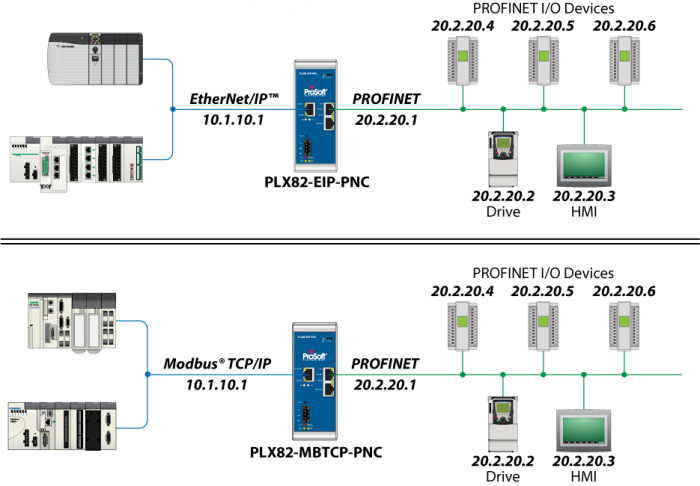
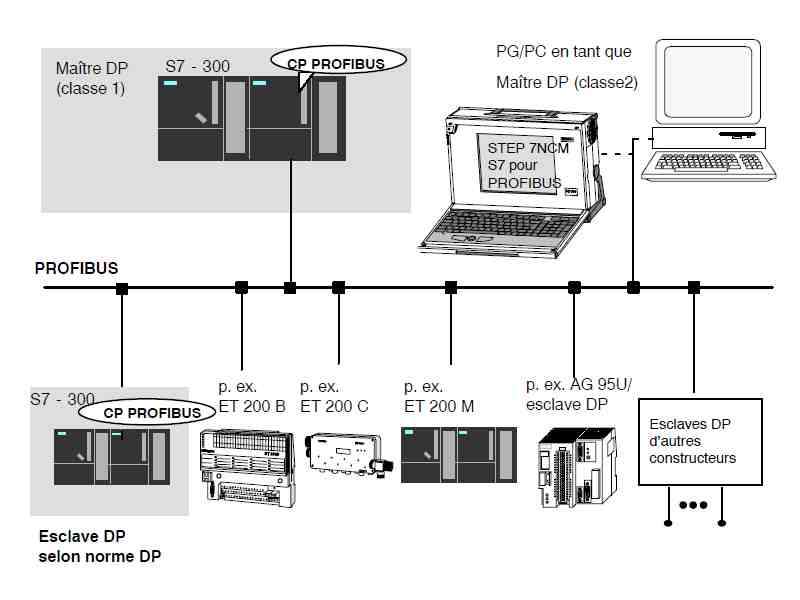
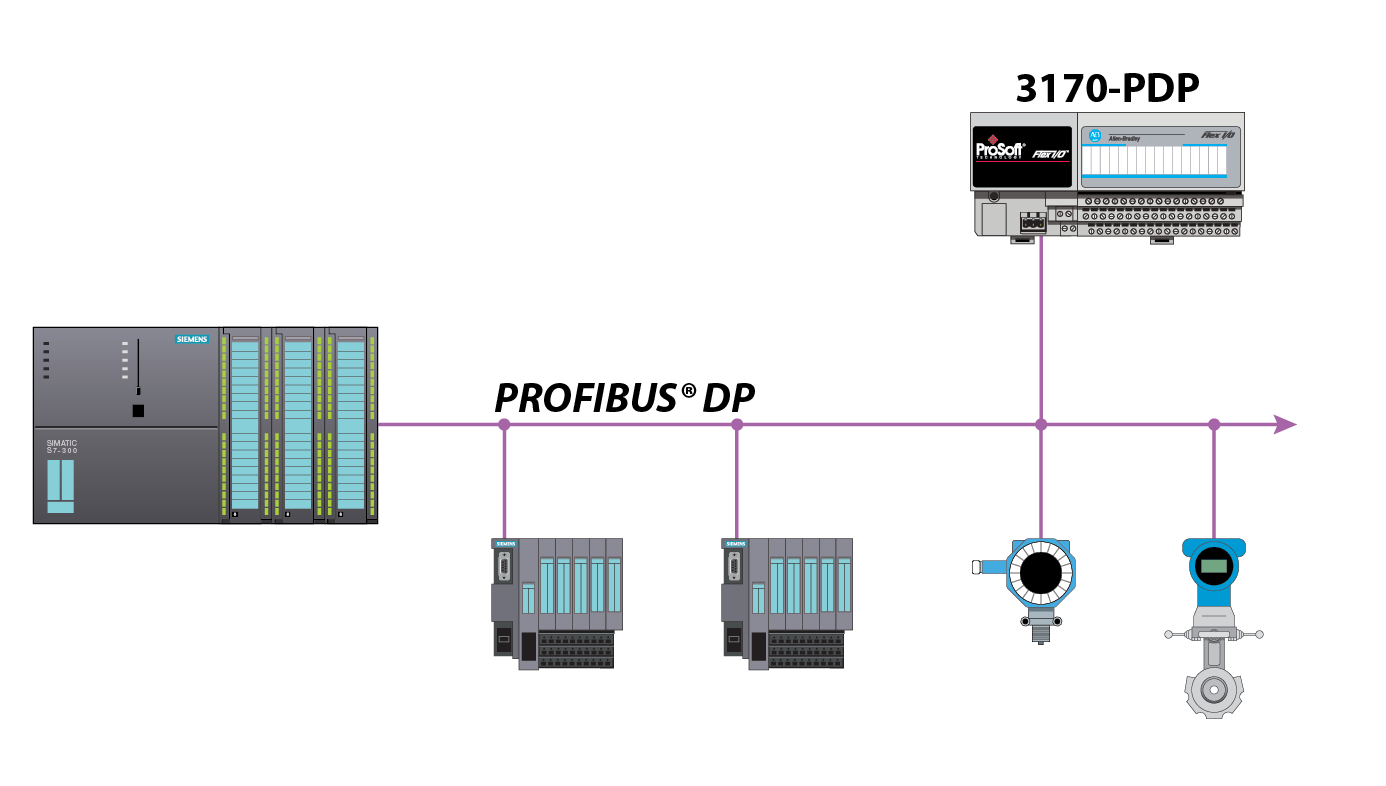
Profibus est l’un des réseaux de terrain largement connus et largement mis en œuvre. Ces réseaux sont principalement utilisés dans les domaines de l’automatisation des processus et de l’automatisation d’usine. Il est le mieux adapté aux tâches de communication complexes et aux applications à temps critique. Il existe trois versions différentes de Profibus, Profibus-DP (périphérie décentralisée), Profibus-PA (automatisation des processus) et Profibus-FMS (Fieldbus Message Specification).
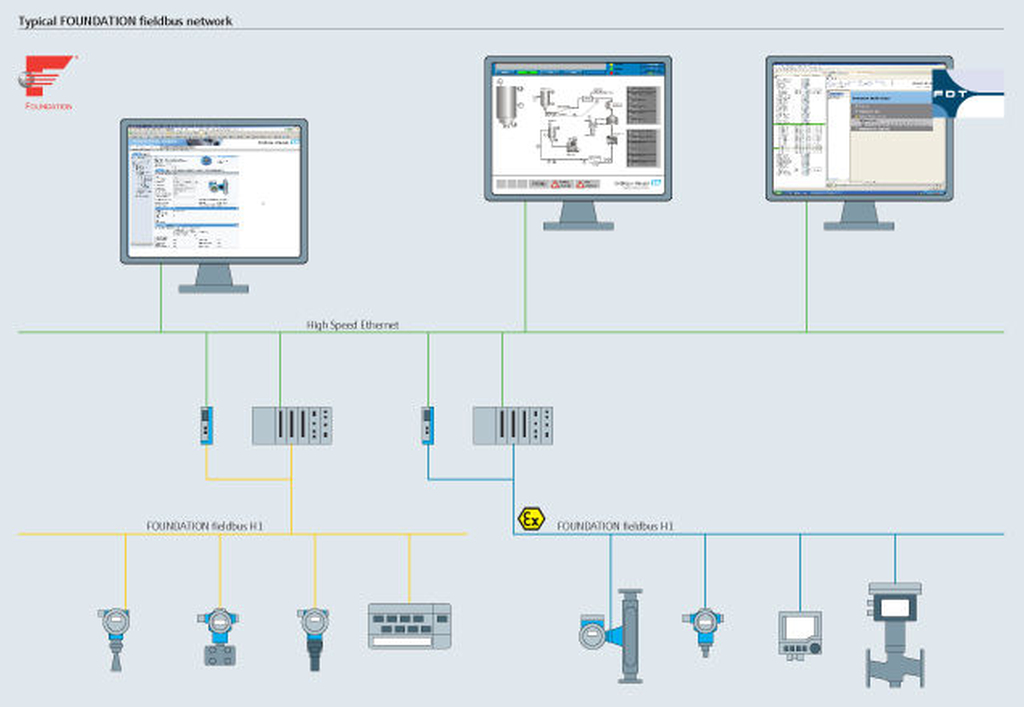
7. Fondation Fieldbus
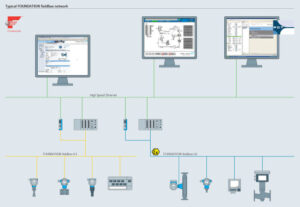
Il s’agit d’une norme de bus de terrain ouverte spécialement conçue pour répondre aux besoins critiques d’un environnement sûr. Il s’agit d’un type de réseau local pour les appareils et les contrôleurs compatibles avec les bus de terrain utilisés dans les industries de fabrication et de transformation.
Il s’agit d’une norme de bus de terrain ouverte spécialement conçue pour répondre aux besoins critiques d’un environnement sûr. Il s’agit d’un type de réseau local pour les appareils et les contrôleurs compatibles avec les bus de terrain utilisés dans les industries de fabrication et de transformation.
Il s’agit d’une norme de protocole numérique bidirectionnelle, définie par la norme de sécurité IEC 61158-2 (pour FF H1) et compatible avec les équipements Ethernet (dans le cas de FF HSE). Les trois types de réseaux FF comprennent le bas débit H1, le haut débit H2 et le haut débit Ethernet HSE.
- Le réseau H1 prend en charge une vitesse de 31,25 kbps.
- Le réseau H2 prend en charge 2 vitesses de 1,0 Mbps et 2,5 Mbps.
- Le réseau HSE prend en charge des vitesses de 10 ou 100 Mbps car il utilise le protocole Ethernet.
Vous êtes arrivez à la fin de cette article sur les réseaux de communication industriels , qui vous a été présenté par TEA LEARNING : n’oublie pas de t’inscrire à notre newsletter en cliquant ici pour ne rein rater, lors de la publication d’un nouvelle article !!


Très intéressant le module de cours
Nous sommes ravis que cela puisse vous faire plaisir !!!!!